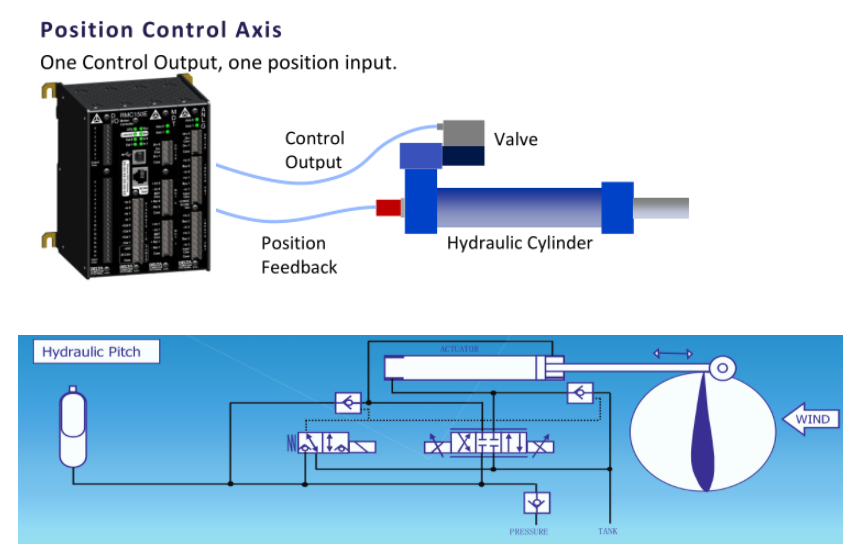
液压变桨系统:
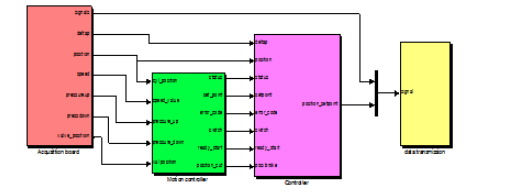
变浆距伺服控制系统的原理框图如图 所示。变浆距控制系统由信号给定、比较器、位置(浆距)控制器、速率控制器、+/ - 转换器、执行机构和反馈回路组成。轮毂控制器与主控制器通过总线通信,浆距参考值由主控制器通过通信总线给定,由轮毂控制器进行变桨控制运算。轮毂控制器根据起, 停机信号、风速以及风机的输出功率进行变桨控制。

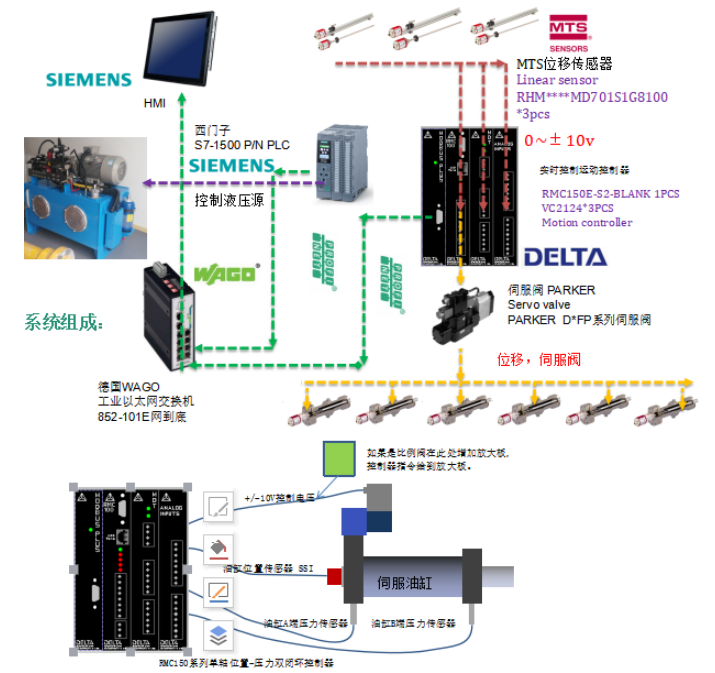
系统组成:
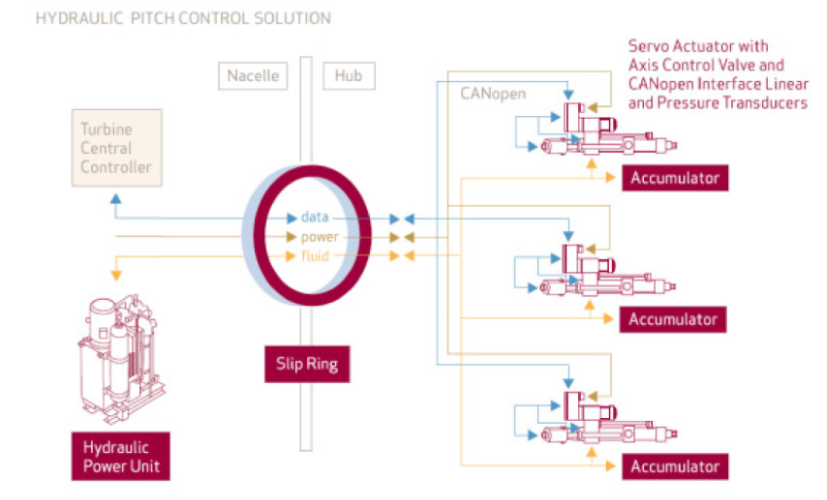
风电液压变桨控制系统
液压源
控制系统
分系统设计:
液压驱动系统
液压驱动系统:
一、风电液压变桨控制系统方案介绍:
1.逻辑控制
2.闭环控制
3.故障诊断与处理
4.数据采集

1、I/O输入输出
2、油温液位监测以及报警
油源控制:
1.自动控制
2手动控制
3.逻辑保护
4.状态显示
5.PLC控制
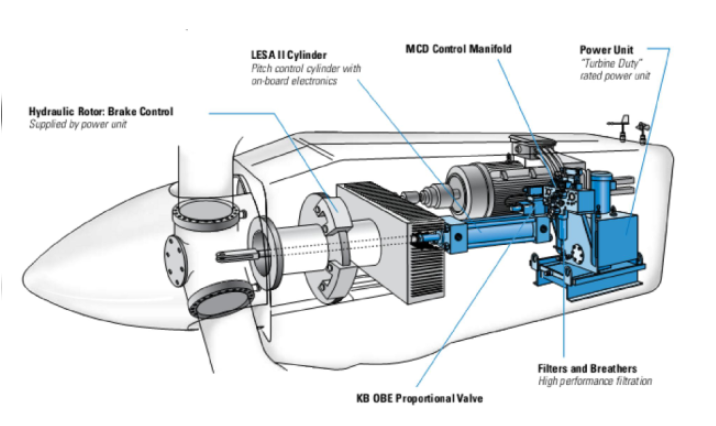
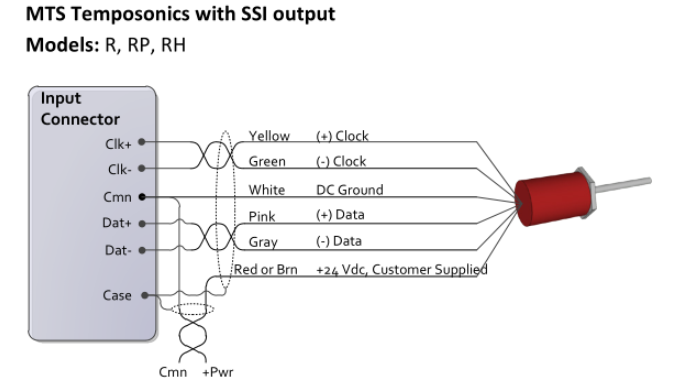
DELTA产品的型号 :RMC150E-S2 (磁致伸缩位移器位移传感器需要SSI输出)
闭环控制:
全功能 PID 闭环控制带速度,加速度和冲击前馈控制可以实现精准同步运动。 分别设定不同运动方向的控制增益以更精准的进行流体驱动控制。
位置控制:
点到点运动
S-曲线
根据位置计算出给定速度
轴耦合,样条,凸轮
循环正弦运动
旋转运动支持增量编程模式和绝对值模式编程
速度控制:
带实际位置反馈的速度控制
带实际速度反馈的速度控制
压力和力控制:
压力传感器,载荷应变单元和差值力
线性和 S 曲线设定值提升
电子齿轮耦合
周期性正余弦曲线
样条,凸轮曲线
位置-压力控制和位置-力控制:
位置控制和压力或力控制之间实现无缝切换
压力或力限定控制-即在位置或速度控制方式下对压力或力进行限制
主动稳定控制对于高性能气动定位系统或容易失稳的系统
开环控制:
开环和闭环控制之间可以无扰动互相切换。复杂系统控制中可以实现控制输出值在两个设定值之间平稳过渡 或在达到目标位置的过程中控制输出随着位置的接近而下降。
快速移动:
移动时开环控制,停止过程采用闭环控制这样可以实现快速运动平稳准确停止
阀特性的线性修正:
对于命令值和流量关系图中线性差的控制阀
用户可定义反馈方式( 新功能 ):
可以使用任何计算出来的数值作为反馈值进行控制
和,差值,平均值
在运行中切换不同反馈信号
带冗余的反馈信号
对传感器的反馈信号进行线性修正
注:以上数据来源采集无锡福艾德实验室数据库信息。