
具有反馈功能的传感器是闭环流体动力控制系统中的必要组成部分。目前,位置传感器有着较宽的价格与性能选择区间。高分辨率的反馈装置,比如磁致伸缩线性位移传感器(MDT)能够提供接近1μm的分辨率。光栅式增量传感器能够提供几分之一um级别的分辨率。尽管在系统设计中往往不要求达到这样的精确度,但是闭环运动控制的应用中,仍经常用到高分辨率传感器来提供速度和加速度反馈,以实现特确调节和平稳的比例传动。
当这两个磁场在波导管相交的瞬间,波导管产生“磁致伸缩”现象,一个应变脉冲即时产生。这个被称为“返回信号”的脉冲以超声的速度从产生点(即位移测量点)运行回传感器电子头,这样位移就被检测出来了。
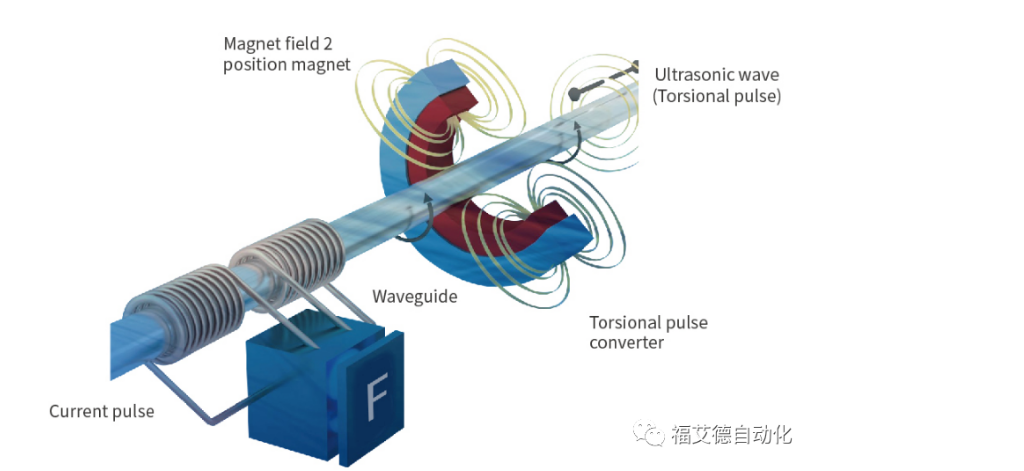

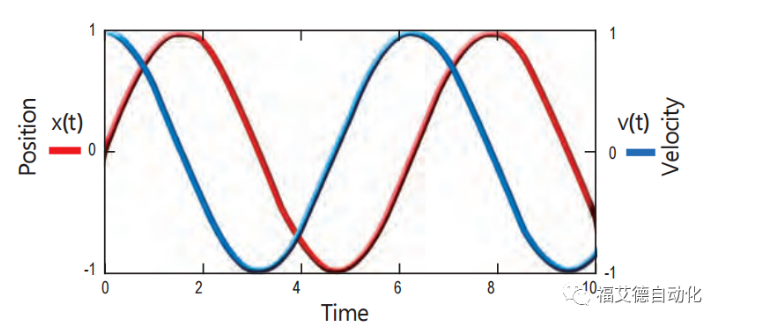
图3-1-1.理想运动系统中的高分辨率位置和速度曲线
图3-1-2显示了将位置圆整到0.001inch去模拟分辨率为0.001inch的反馈装置的效果。比较这两个图,它们的位置点的不同并不明显。如果机器只需要维持一. 个稳定的位置,那么将分辨率降到0.001 inch也许就可以满足这一点。但是从第二张图上很容易发现,因为量化和位置分辨率的降低,派生的速度曲线变得非常粗糙这在实际操作环境中,会对电子传动和使用微分增益维持稳定的控制系统的可重复性带来麻烦,因为准确的速度计算对这样系统来说至关重要。微分增益(D)常在PID控制系统中使用,因为其电子阻尼作用能够使系统更加的稳定。微分增益可以用来减小系统目标位置变化速率(目标速度)与实际位置变化速率(实际速度)之间的误差。微分增益在控制系统中往往未被充分利用,因为它被认为有“噪音”干扰。这种“噪音”通常是由低分辨率的反馈信号引起的,所以使用高分辨率的反馈装置能够降低“噪音”干扰。
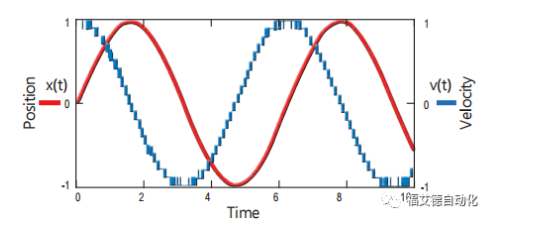
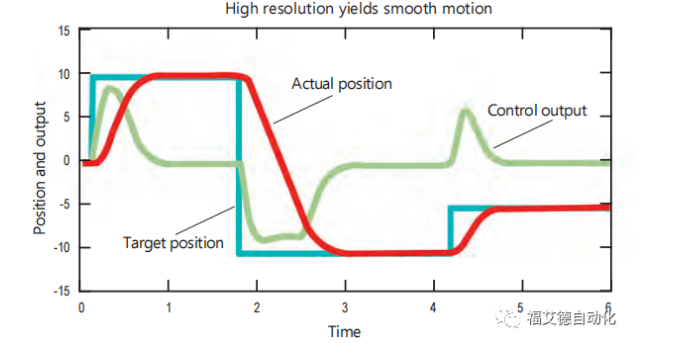
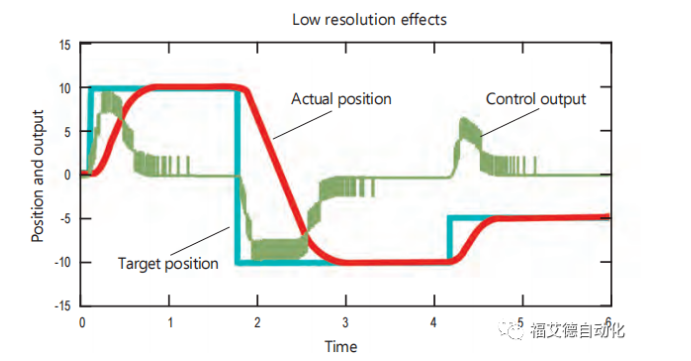
图3-1-4.把模拟反馈分辨率减少到0.01inch时出现了控制输出的噪音和阶跃变化
图3-1-3、图3-1-4 两张图显示了两个其它条件完全一样、 仅仅反馈装置分辨率不同的闲环系统曲线之间的差异。图3-1-3显示了模拟001 inch反馈分辨率下的曲线。可以注意到,控制器输出信号(绿线) 是相对平滑的。图3-1-4是具有完全相同的运动序列和控制回路增益的曲线,但是反馈分辨率降低到0.01inch.这时我们注意到控制输出信号有更大的跃变,而且看起来有“噪音”干扰。这种“噪音”不会给模拟结果造成太大的影响,但在实际系统当中,假如每次扫描的输出电压变化1至2V,系统会变得不可控制。这种看起来有“噪音”的输出,是由于微分环节使用了低分辨率的反馈,所以只能对带“噪音”的速度进行计算。
过滤
系统中加入过滤,能够帮助去除电子噪声干扰和量化误差。但这里有个权衡,增加过滤会成比例地根据速率变化对系统造成延迟,这就是所谓的相位滞后,它会降低系统的可控性。为了使驱动从动装置的目标输出变得平滑,可以在主反溃装置部分增加过滤,但缺点是在主反馈的速度发生变化时会引人跟随误差。
分辨率与电子比例传动运用
另一个要求应用高分辨率的领域就是电子比例传动系统。控制器生成的运动曲线和轨迹,能控制单个或多个从动轴,让它们跟随着来自于主编码器或主反馈装置的位置和速度信号运动。如果主反馈装置的分辨率低,那么所产生的旨在让从动轴来跟踪的运动曲线分辨率也会很低,而且不平滑。当主反馈信号不平滑时,从动轴可能无法使用前馈增益或微分增益,从而导致从动部分的动态响应受到限制,或不能确切地跟随主编码器或主反馈装置的信号曲线来运动。
结论
高分辨率的位置反馈装置应该用F低速或者需要迅速加速或减速的情况,以及需要电子阻尼的执行器的运动控制中( 不仅仅是用PID挖制中的比例环节P)。另外,高分辨本的反馈同样可以用于主/从传动或者电子式凸轮的应用,这些应用需要主反馈为从动装置提供平滑的运动曲线。所幸的是,现今市场上很多传感器都能够提供达到1um的位置分辨率,这使得控制器能够实现更快、更平稳的机械动作控制。
