当应用需要高作用力和重负载时,通常选择液压系统,而运动控制器提供了必要的精度和安全性。

当应用需要高的力并且设备必须提升重负载时,液压是首选技术。但至关重要的是,要准确利用这种力量,防止对工人和机器造成伤害。不列颠哥伦比亚省温哥华市西部森林产品公司(WFP)的工程师们转向了一种先进的运动控制系统,以避免这种头痛,并确保安全无故障的操作。
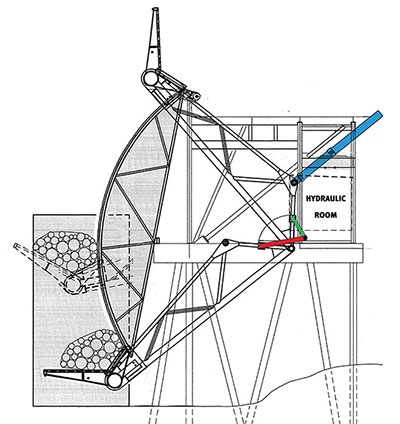
该公司位于不列颠哥伦比亚省Ladysmith的工厂使用两个强大的31英尺长的液压缸,负载能力为50吨,将一捆捆铁杉、花旗松和红雪松原木从相邻的海湾中吊出。
油缸连接到一对提升臂上,提升臂连接到大型支架的两侧。支架将原木捆以弧形提升到磨机运行的高架原木平台上。两个提升臂必须一致移动,否则偏心力可能会损坏支架,停止生产,并需要昂贵的维修。
控制升级
为了提高原木提升操作的可靠性,工厂经理批准了世界粮食计划署电气主管Cory Wilson和维护可靠性工程师Jarrad Astren的建议,升级操作臂的运动控制系统。Wilson说:“我们过去用大约1986年的PLC操作线性定位模块来控制手臂,但很难确保手臂一致移动。”。“旧系统是20年前安装的,机械和电气部件有很多腐蚀。我们想使用刚性管道和不锈钢来更新新设备,以防止盐水的腐蚀作用。我们还想要一种运动控制解决方案,可以精确同步手臂的运动。”

工人们之前在工厂安装了几台新机器,这些机器使用了华盛顿州Battle Ground的DELTA计算机系统公司制造的运动控制器,效果良好。事实证明,用DELTA装置进行故障排除比过去使用的其他控制系统容易得多。
为了管理液压臂提升缸的同步,DELTA的RMC运动控制器具有内置的轴同步功能,从而可以通过电子方式将一个轴的运动精确地连接到另一个轴。对于该应用,Wilson选择了八轴RMC150液压运动控制器。
同步动作
运动控制器使用从安装在30英寸以下较小气缸中的磁致伸缩线性位移传感器(MLDT)获得的位置数据来管理提升气缸。以下每个油缸都安装在主提升油缸下方的提升臂上。通过从MLDT读取位置信息并考虑较小和较大气缸之间的尺寸比,运动控制器精确地计算主气缸的所需位置。
Delta RMC150还连接到安装在大气缸中的压力传感器,该传感器允许运动控制器监测液压并将其显示在捆束升降机的人机界面(HMI)上。
Wilson说:“我们现在只是在监测压力,但将来我们可以使用这些压力信息来称量原木捆。”。为了精确控制油缸伸出,RMC150驱动两个比例伺服阀,每个阀控制一个主提升油缸。

RMC150精确地同步运动操作。当一个气缸移动时,另一个气缸也会移动。如果轴滞后过多,控制器将停止运动。威尔逊解释说:“这种自动控制给了我们巨大的优势。”。
“提升臂末端的最大偏差为9或10英寸,而不会损坏原木托架,因此我们设计了新的提升系统,以使捆束提升的末端彼此之间的距离保持在4或4.5英寸以内。
原木托架将根据负载以不同的速度升高和降低,移动捆束升降机所需的力的大小也会根据臂的角度而变化。尽管速度可能会变化,但手臂的运动是连续同步的。
除了主提升臂外,DELTA运动控制器还处理第三个运动轴,该轴控制第二个设备,该设备将原木从原木平台一次一个地提升到送入磨机的皮带上。为了控制该轴,RMC150从嵌入另一个跟随气缸内的MLDT获得位置输入,以通过另一个液压伺服阀控制该气缸中的油流。因为一个RMC150可以同时处理多达八个运动轴,所以同一控制器处理捆提升臂和原木提升臂同时移动是没有问题的。
温度补偿
三个液压单元,共包含十个50马力的电机,为捆束提升设备提供高压流体。由于液压流体的特性可以随温度而变化,因此系统可以在不同的环境条件下对相同的控制输入做出不同的反应。为了最大限度地减少这些影响,Wilson在系统升级中进行的另一项更改是在所有液压动力装置中安装模拟温度传感器,使PLC能够监测温度并控制液压泵。
HMI显示每个电机上的液压油温度、油箱液位和泵电流,因此操作员可以观察读数之间的任何差异并采取任何必要的行动。Wilson说:“我们现在可以快速判断出哪台泵可能有问题。”。
Astren补充道:“能够使用DELTA控制器实时监测设备的状况,有助于简化我们的维护程序。我们现在可以在设备出现故障之前发现液压问题,并可以采取预防性行动,而不是被动行动。”。
WFP工程团队开发了捆束升降机的HMI。DELTA控制器通过EtherNet/IP提供所有关键系统参数值,供外部PLC读取,然后由外部PLC获取信息并将其显示在操作员屏幕上。
世界粮食计划署的控制小组使用DELTA计算机系统公司的RMCTools软件对该运动进行编程。它包括一个功能强大的Plot Manager工具,可实时显示目标和实际运动参数值之间的差异,以及一个Tuning Wizard,可简化设置闭环控制中使用的增益因子的任务。
Wilson指出:“我们看到,在冲程的某些区域,臂难以提升负载,但我们发现,我们可以简单地将新的控制回路增益系数插入系统,使其完美工作。”。“RMCTools允许我们动态地进行调优。”
捆束提升控制装置现已设计为,如果提升臂不对齐,它们将停止。要重置运动,操作员发出启动命令,运动控制器将手臂重新对齐,然后循环恢复。